Équipements
Techniques et équipements employés
L’ingénierie technique et la réalisation de robots ou de caméras d’inspection spécifiques sont le cœur de métier de CamExplo. Avec une expérience de plusieurs centaines d’inspections, CamExplo vous apporte une gamme complète d’équipements, drone, robots, caméras etc…

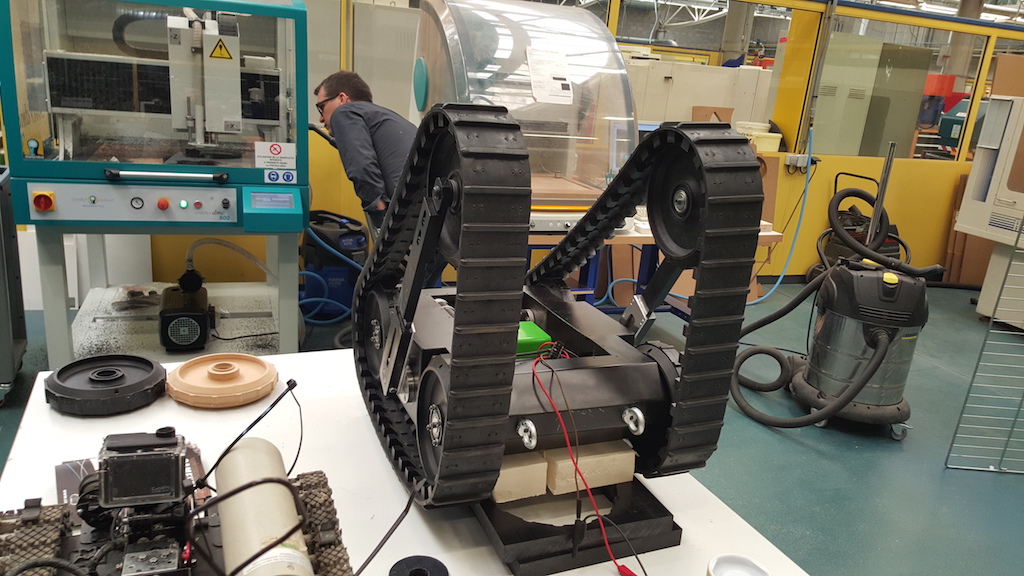
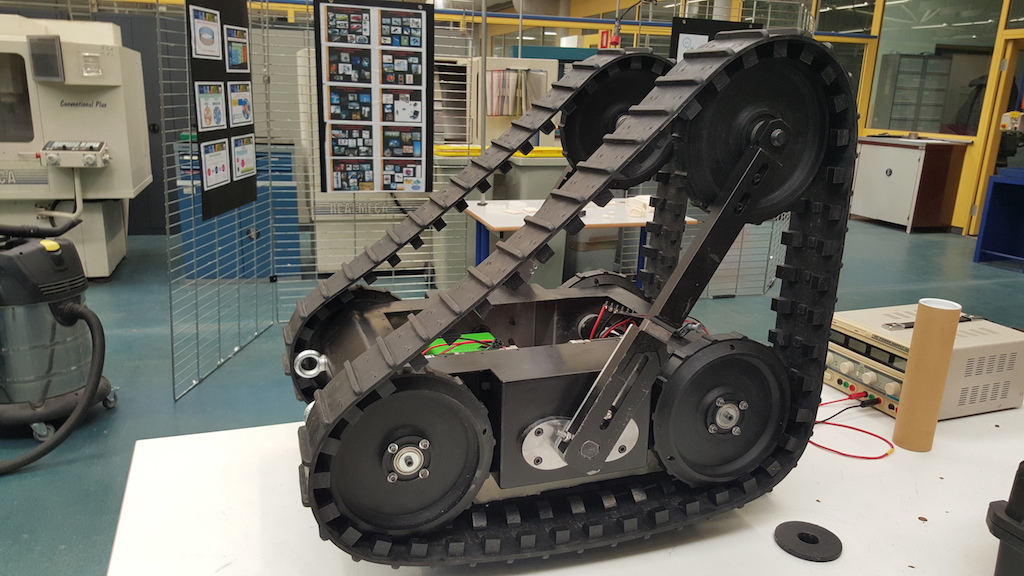
La conception des caméras, des drones et des robots d’inspection est spécifique aux interventions souterraines. Ils sont notamment munis de caméras haute définition et sont spécialement développés pour se déplacer sur des terrains difficiles (loess, rocailles…).

En exemple, notre robot HERMES a spécialement été développé et modernisé pour intervenir chez EDF. Il apporte la solution aux exploitants d’installation hydraulique pour réaliser les inspections vidéo sur de longues distances, jusqu’à 1000m et ceci sans aucune interruption.
Certaines de nos caméras d’inspection verticales sont équipées de télémètre laser millimétrique couplés à une boussole numérique. Ainsi, le volume des cavités et l’orientation des galeries peuvent être connus depuis la surface, simplement via un forage de 10 cm de diamètre et jusqu’à 100m de profondeur.
Les robots et les équipements de la société sont des développements spécifiques et ne sont pas mis en locations ni en ventes.
Une partie seulement de nos robots et de nos caméras sont actuellement visibles en ligne, n’hésitez pas à nous contacter pour plus d’informations.
Qu’est-ce qu’une inspection télévisée ?
Une inspection télévisée également appelée I.T.V est une technique de monitorage visuel non destructive qui consiste à insérer dans vos installations (galerie souterraine, conduite forcée, canalisation, etc…) un robot muni d’une caméra d’inspection à tête rotative dans le but de procéder à une inspection précise.
Cette inspection est visualisée directement en surface sur un moniteur. Le client a ainsi une vue en temps réel et peut si nécessaire guider le pilote pour visualiser un secteur précis.
Un enregistrement instantané est effectué sur un support numérique et retranscrit sur un support papier fournit au client.
Quels sont les objectifs d’une inspection visuelle ?
Ce contrôle a pour objectif premier de vérifier et de détecter d’éventuels défauts structurels et fonctionnels. On entend par défauts les anomalies suivantes: infiltrations et exfiltrations, les fissures, les déformations : effondrements, écrasements, affaissements de voûte, éclatements, ovalisation (avec évaluation pour les matériaux déformants), perforations et poinçonnements.

Mais ce n’est pas tout ! Une inspection télévisée mettra en évidence l’urgence des réparations à réaliser et ainsi intervenir en amont de tout dysfonctionnements ou de risques.
Qu’elle est la méthode d’inspection ?
Pour la réalisation d’une inspection télévisée et pour chaque environnement, il existe une procédure à suivre et des matériels spécifiques à utiliser. Pour ce faire il faudra faire appel à un spécialiste qualifié et professionnel. Avant toute inspection télévisée dans une canalisation, un curage sera nécessaire.